

机器人、设备、图像、安全的 统合控制
栏目:专题报道
发布时间:2020-10-30
机器人、设备、图像、安全的
统合控制
机械自动化控制器NJ系列
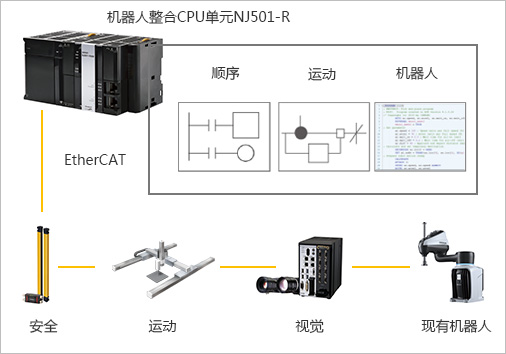
机器人统合CPU单元
NJ501-R系列
One controller无缝顺畅的整合顺序,运动与机人控制。提升机器人引入设备的效率。
除了顺序、运动之外,还将机器人控制整合至One Controller中,可以对包括机器人在内的每个设备执行同步控制, 并收集与每个设备的时间轴匹配的“可用”信息。
不同种引擎的整合控制
将循环扫描型程序执行(PLC功能)和顺序执行型程序执行(机器人功能)的两个具有完全不同特性的引擎整合至One Controller,使两者的程序任务、I/O刷新同步运行。
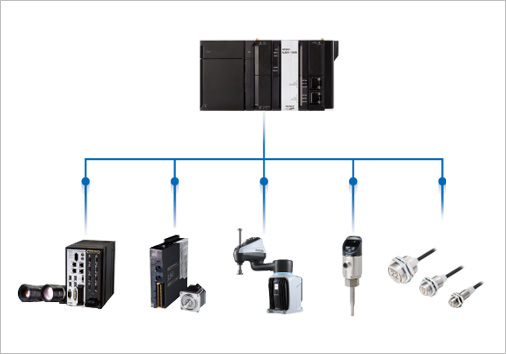
信息的准确性(同步性)
在EtherCAT网络上连接机器人、运动、图像传感器等设备,并进行同步控制,可确保每个设备数据的同步性,收集到真实“可用”的数据,准确地显示设备的运行状态。
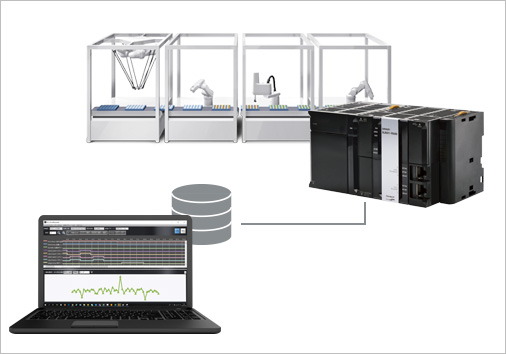
连接数据库,轻松实现设备状态的可视化
无需通过网关,直接与One Controller连接,只需用控制器的专用指令即可轻松访问数据库。实时的数据收集,提高生产效率,实现预防性维护和品质可追溯性。
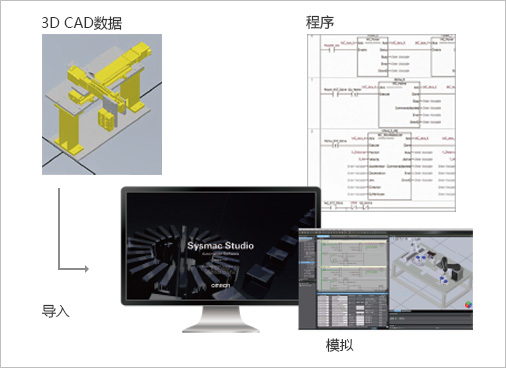
One Software即可实现机器人和机器控制相整合的编程和3D模拟,掀起工程链的革新
将一直以来相互独立的机器人和机械控制编程语言统一,确立了可在一个软件整合开发环境中轻松进行模拟的技术。可在虚拟环境中将真实环境的生产设备连接起来,进行远程的设备启动和设备维护。
PLC&机器人整合模拟
利用由3D CAD设计的CAD数据和控制程序,在没有3D CAD软件的情况下,只需PLC的编程工具,即可对机器人、输入设备乃至输出设备进行3D模拟,进行设备检验。此外,模拟架构也可通过向导方式实现轻松设定。
上一篇:
实现了重型货物运输的自动化
下一篇:
3D机器视觉在工业智能中的大规模应用